Distributing Pure Python ROS Applications
In June 2013 I was lucky to speak at the fantastic SciPy2013 conference (scientific computing with python). I spoke about a work flow and tools we have developed at strawlab. The title of my talk was Managing Complex Experiments, Automation, and Analysis using Robot Operating System. The video of that talk is included below;
And here are the accompanying slides;
This post describes a tool I developed for distributing ROS packages to scientific collaborators. That software is called ros-freeze.
For those of you not aware, ROS is a great framework traditionally targeted for robotics but usable in other fields too. In particular it has a relatively good performance and simple, strongly typed, inter-process-communication framework and serialization format. This is simultaneously useful for creating distributed realtime-ish systems with comprehensive logging of the system state. Best of all, the python interface to ROS is very clean.
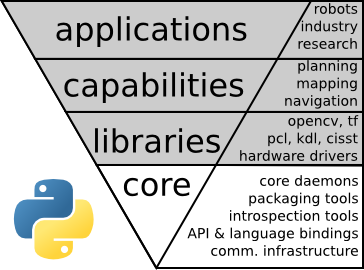
Unfortunately, being a framework, ROS is rather all-or-nothing (going as far as to describe itself as a meta-operating system). The basic ROS install is several gigabytes, and building it yourself can be rather difficult. Furthermore, as I mentioned in my presentation, it is attractive to use the built in ROS tool rosbag for recording timestamped data to disk. Unfortunately, reading these files again needs ROS, thus necessarily coupling experimental data to the software used to collect it.
To remedy this I wrote ros-freeze, a python tool to convert any ROS package into a pure-python package including all of the dependencies. Collaborators can then install the python package and immediately have access to all the same ROS packages and libraries without having to build the whole ROS stack.
Converting your ROS package
Download ros-freeze from here
Modify setup-freeze.py according to your needs
from setuptools import setup from rosfreeze import import_ros_package, get_disutils_cmds MY_PACKAGE = 'foo' setup(name='python-ros-%s' % MY_PACKAGE, version='1.0', description='Pure Python ROS %s' % MY_PACKAGE, author='', author_email='', **get_disutils_cmds(srcdir, bindir, datadir) )
Build a python egg (for example)
$ python setup-freeze.py bdist_egg
Install that egg into your virtual environment
Caveats and other Notes
- this is currently working on ROS Electric (an old release, at work we have chosen to stick with Ubuntu 12.04LTS)
- changes for other ROS distributions might be necessary, so please get in touch
- this is successfully tested on ROS packages containing tens of thousands of lines of code and dozens of ROS dependencies.
- although recent ROS releases have improved the package management situation (by embracing deb packaging, yay!) this tool provides an unprecedentedly easy way to distribute your pure python ROS applications
A Pure Python ROS Distribution?
One side effect of this was the packaging of the pure python ROS core as an easily installable python egg. This means that you can write, debug and test python ROS nodes without having to install the whole ROS distribution.
One can even go as far as running rosmaster and the command line tools (rosnode, rosparam, etc)!
You can download the python-ros-electric package from here.